La leçon commence par deux descriptions mathématiques équivalentes des mesures :
Les mesures générales peuvent être décrites par des collections de matrices, une pour chaque résultat de mesure, d'une façon qui généralise la description des mesures projectives.
Les mesures générales peuvent être décrites comme des canaux dont les sorties sont toujours des états classiques (représentés par des matrices densité diagonales).
Nous limiterons notre attention aux mesures ayant un nombre fini de résultats possibles.
Bien qu'il soit possible de définir des mesures avec un nombre infini de résultats possibles, elles sont beaucoup moins fréquentes dans le contexte du calcul et du traitement de l'information, et elles nécessitent en outre des mathématiques supplémentaires (à savoir la théorie de la mesure) pour être formalisées correctement.
Nous nous concentrerons d'abord sur les mesures dites destructives, où la sortie de la mesure est uniquement un résultat de mesure classique — sans spécification de l'état quantique post-mesure du système mesuré.
De façon intuitive, on peut imaginer qu'une telle mesure détruit le système quantique lui-même, ou que le système est immédiatement mis de côté une fois la mesure effectuée.
Plus loin dans la leçon, nous élargirons notre perspective et considérerons les mesures non destructives, où il y a à la fois un résultat de mesure classique et un état quantique post-mesure du système mesuré.
Supposons que X est un système à mesurer, et supposons pour simplifier que l'ensemble des états classiques de X est {0,…,n−1} pour un certain entier positif n, de sorte que les matrices densité représentant les états quantiques de X sont des matrices n×n.
Nous n'aurons pas vraiment besoin de faire référence aux états classiques de X, mais il sera pratique de faire référence à n, le nombre d'états classiques de X.
Nous supposons aussi que les résultats possibles de la mesure sont les entiers 0,…,m−1 pour un certain entier positif m.
Note : nous utilisons ces noms simplement pour rester concis ; il est facile de généraliser tout ce qui suit à d'autres ensembles finis d'états classiques et de résultats de mesure, en les renommant comme bon te semble.
Rappelle-toi qu'une mesure projective est décrite par une collection de matrices de projection dont la somme est la matrice identité.
En symboles,
{Π0,…,Πm−1}
décrit une mesure projective de X si chaque Πa est une matrice de projection n×n et si la condition suivante est satisfaite.
Π0+⋯+Πm−1=IX
Lorsqu'une telle mesure est effectuée sur un système X dans un état décrit par un vecteur d'état quantique ∣ψ⟩, chaque résultat a est obtenu avec une probabilité égale à ∥Πa∣ψ⟩∥2.
Nous avons également que l'état post-mesure de X est obtenu en normalisant le vecteur Πa∣ψ⟩, mais nous ignorons l'état post-mesure pour l'instant.
Si l'état de X est décrit par une matrice densité ρ plutôt que par un vecteur d'état quantique ∣ψ⟩, alors on peut exprimer alternativement la probabilité d'obtenir le résultat a comme Tr(Πaρ).
Si ρ=∣ψ⟩⟨ψ∣ est un état pur, les deux expressions sont égales :
Ici, nous utilisons la propriété cyclique de la trace pour la deuxième égalité, et pour la troisième égalité nous utilisons le fait que chaque Πa est une matrice de projection, et satisfait donc Πa2=Πa.
En général, si ρ est une combinaison convexe
ρ=k=0∑N−1pk∣ψk⟩⟨ψk∣
d'états purs, alors l'expression Tr(Πaρ) coïncide avec la probabilité moyenne pour le résultat a, grâce au fait que cette expression est linéaire en ρ.
Une description mathématique des mesures générales s'obtient en assouplissant la définition des mesures projectives.
Plus précisément, on autorise les matrices de la collection décrivant la mesure à être des matrices semi-définies positives arbitraires plutôt que des projections.
(Les projections sont toujours semi-définies positives ; on peut aussi les définir comme des matrices semi-définies positives dont toutes les valeurs propres sont 0 ou 1.)
En particulier, une mesure générale d'un système X ayant pour résultats 0,…,m−1 est spécifiée par une collection de matrices semi-définies positives {P0,…,Pm−1} dont les lignes et les colonnes correspondent aux états classiques de X et qui satisfont la condition
P0+⋯+Pm−1=IX.
Si le système X est mesuré alors qu'il est dans un état décrit par la matrice densité ρ, alors chaque résultat
a∈{0,…,m−1} apparaît avec probabilité Tr(Paρ).
Comme nous devons naturellement l'exiger, le vecteur de probabilités des résultats
(Tr(P0ρ),…,Tr(Pm−1ρ))
d'une mesure générale forme toujours un vecteur de probabilités, quel que soit le choix d'une matrice densité ρ.
Les deux observations suivantes montrent que c'est bien le cas.
Chaque valeur Tr(Paρ) est nécessairement non négative, grâce au fait que la trace du produit de deux matrices semi-définies positives est toujours non négative :
Q,R≥0⇒Tr(QR)≥0.
Une façon d'argumenter ce fait est d'utiliser les décompositions spectrales de Q et R avec la propriété cyclique de la trace pour exprimer la trace du produit QR comme une somme de réels non négatifs, qui est donc non négative.
La condition P0+⋯+Pm−1=IX combinée à la linéarité de la trace garantit que les probabilités somment à 1.
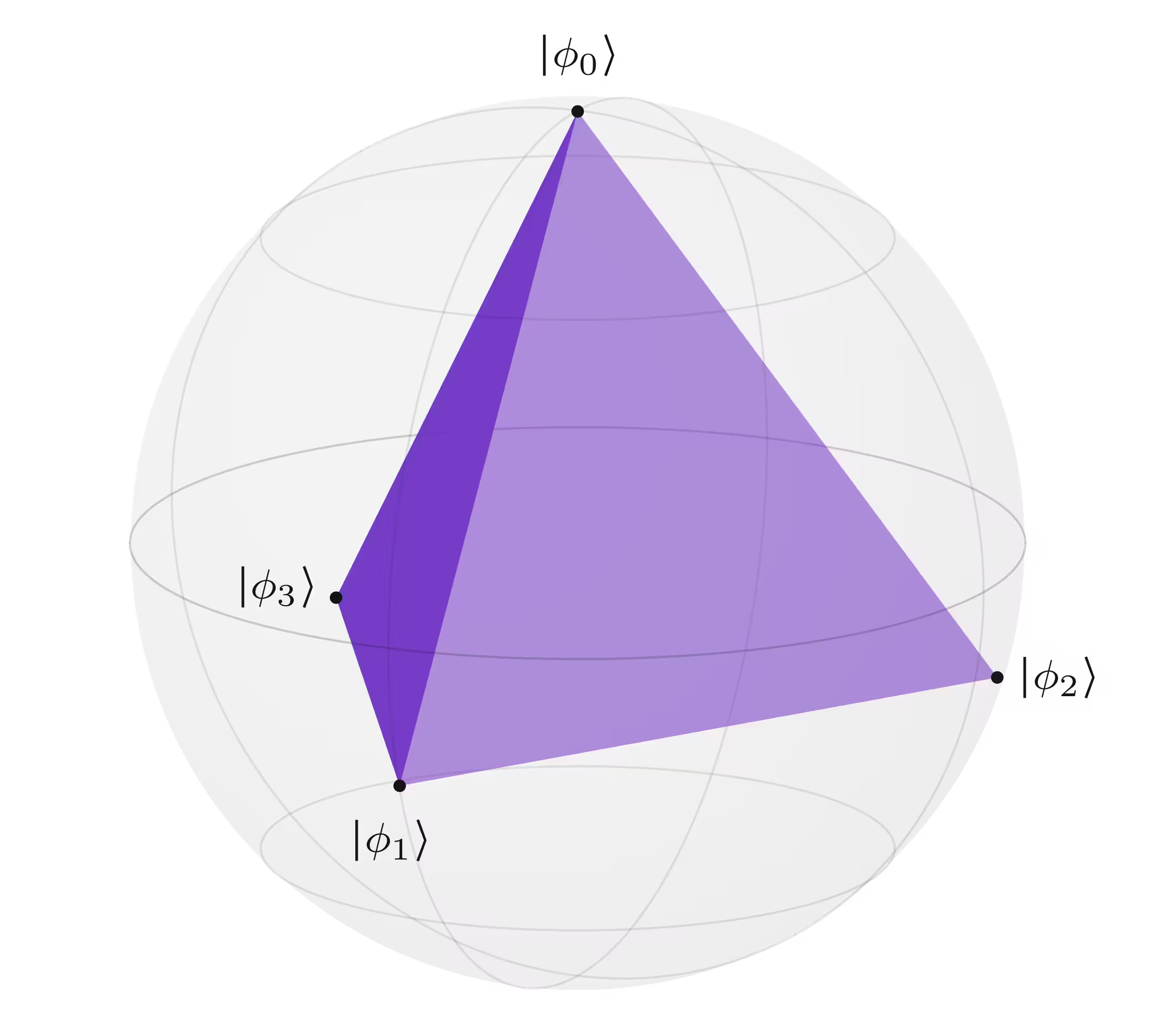
Supposons que X est un qubit, et définissons deux matrices comme suit.
P0=(32313131)P1=(31−31−3132)
Ces deux matrices sont semi-définies positives : elles sont hermitiennes, et dans les deux cas les valeurs propres sont 1/2±5/6, qui sont toutes deux positives.
De plus, P0+P1=I, et donc {P0,P1} décrit une mesure.
Si l'état de X est décrit par une matrice densité ρ et que l'on effectue cette mesure, alors la probabilité d'obtenir le résultat 0 est Tr(P0ρ) et la probabilité d'obtenir le résultat 1 est
Tr(P1ρ).
Par exemple, si ρ=∣+⟩⟨+∣ alors les probabilités pour les deux résultats 0 et 1 sont les suivantes.
Ces quatre états sont parfaitement répartis sur la sphère de Bloch, chacun étant équidistant des trois autres, et l'angle entre deux quelconques d'entre eux est toujours le même.
Définissons maintenant une mesure {P0,P1,P2,P3} d'un qubit en posant Pa comme suit pour chaque a=0,…,3.
Pa=2∣ϕa⟩⟨ϕa∣
Nous pouvons vérifier que c'est une mesure valide de la façon suivante.
Chaque Pa est manifestement semi-définie positive, étant un état pur divisé par deux.
C'est-à-dire que chacune est une matrice hermitienne ayant une valeur propre égale à 1/2 et toutes les autres valeurs propres nulles.
La somme de ces matrices est la matrice identité : P0+P1+P2+P3=I.
L'expression de ces matrices comme combinaisons linéaires de matrices de Pauli rend cette vérification directe.
Une deuxième façon de décrire les mesures en termes mathématiques est de les voir comme des canaux.
L'information classique peut être vue comme un cas particulier de l'information quantique, dans la mesure où l'on peut identifier les états probabilistes à des matrices densité diagonales.
Ainsi, en termes opérationnels, on peut penser aux mesures comme étant des canaux dont les entrées sont des matrices décrivant les états du système mesuré et dont les sorties sont des matrices densité diagonales décrivant la distribution résultante des résultats de mesure.
Nous verrons bientôt que tout canal ayant cette propriété peut toujours être écrit sous une forme simple et canonique qui se relie directement à la description des mesures comme collections de matrices semi-définies positives.
Inversement, étant donné une mesure arbitraire sous forme d'une collection de matrices, il existe toujours un canal valide ayant la propriété de sortie diagonale qui décrit la mesure donnée comme suggéré dans le paragraphe précédent.
En combinant ces observations, nous trouvons que les deux descriptions des mesures générales sont équivalentes.
Avant d'aller plus loin, précisons davantage la mesure, la façon dont nous la voyons comme un canal, et les hypothèses que nous formulons.
Comme précédemment, nous supposerons que X est le système à mesurer, et que les résultats possibles de la mesure sont les entiers 0,…,m−1 pour un certain entier positif m.
Nous notons Y le système qui stocke les résultats de mesure, donc son ensemble d'états classiques est {0,…,m−1}, et nous représentons la mesure comme un canal nommé Φ de X vers Y.
Notre hypothèse est que Y est classique — c'est-à-dire que quel que soit l'état de départ de X, l'état de Y que l'on obtient est représenté par une matrice densité diagonale.
On peut exprimer mathématiquement que la sortie de Φ est toujours diagonale de la façon suivante.
On définit d'abord le canal de déphasage complet Δm sur Y.
Δm(σ)=a=0∑m−1⟨a∣σ∣a⟩∣a⟩⟨a∣
Ce canal est analogue au canal de déphasage complet de qubit Δ de la leçon précédente.
En tant qu'application linéaire, il annule toutes les entrées hors-diagonale d'une matrice d'entrée et laisse la diagonale inchangée.
Et maintenant, une façon simple d'exprimer qu'une matrice densité donnée σ est diagonale est par l'équation
σ=Δm(σ).
En d'autres termes, annuler toutes les entrées hors-diagonale d'une matrice densité n'a aucun effet si et seulement si les entrées hors-diagonale étaient déjà toutes nulles au départ.
Le canal Φ satisfait donc notre hypothèse — que Y est classique — si et seulement si
Φ(ρ)=Δm(Φ(ρ))
pour toute matrice densité ρ représentant un état de X.
Ainsi, pour ces mêmes matrices P0,…,Pm−1 on peut exprimer le canal Φ comme suit.
Φ(ρ)=a=0∑m−1Tr(Paρ)∣a⟩⟨a∣
Cette expression est cohérente avec notre description des mesures générales en termes de matrices, car on voit chaque résultat de mesure apparaître avec probabilité Tr(Paρ).
Observons maintenant que les deux propriétés requises de la collection de matrices {P0,…,Pm−1} pour décrire une mesure générale sont bien satisfaites.
La première propriété est qu'elles sont toutes des matrices semi-définies positives.
Une façon de le voir est d'observer que, pour tout vecteur ∣ψ⟩ ayant des entrées en correspondance avec l'état classique de X, on a
Vérifions maintenant que pour toute collection {P0,…,Pm−1} de matrices semi-définies positives satisfaisant P0+⋯+Pm−1=IX, l'application définie par
Φ(ρ)=a=0∑m−1Tr(Paρ)∣a⟩⟨a∣
est bien un canal valide de X vers Y.
Une façon de le faire est de calculer la représentation de Choi de cette application.
La transposée de chaque Pa est introduite pour la troisième égalité parce que
⟨c∣Pa∣b⟩=⟨b∣PaT∣c⟩.
Cela permet aux expressions ∣b⟩⟨b∣ et ∣c⟩⟨c∣ d'apparaître, qui se simplifient en la matrice identité lors de la sommation sur b et c, respectivement.
Par l'hypothèse que P0,…,Pm−1 sont semi-définies positives, il en va de même pour P0T,…,Pm−1T.
En particulier, la transposée d'une matrice hermitienne est une autre matrice hermitienne, et les valeurs propres de toute matrice carrée et de sa transposée coïncident toujours.
Il s'ensuit que J(Φ) est semi-définie positive.
En traçant le système de sortie Y (le système de droite), on obtient
Supposons que nous ayons plusieurs systèmes collectivement dans un état quantique, et qu'une mesure générale soit effectuée sur l'un des systèmes.
Cela donne l'un des résultats de mesure, sélectionné aléatoirement selon des probabilités déterminées par la mesure et l'état du système avant la mesure.
L'état résultant des systèmes restants dépendra alors, en général, du résultat de mesure obtenu.
Examinons comment cela fonctionne pour une paire de systèmes (X,Z) lorsque le système X est mesuré.
(Nous nommons le système de droite Z parce que nous prendrons Y pour désigner un système représentant la sortie classique de la mesure lorsque nous la voyons comme un canal.)
On peut ensuite facilement généraliser à la situation où l'ordre des systèmes est inversé, ainsi qu'à trois systèmes ou plus.
Supposons que l'état de (X,Z) avant la mesure est décrit par une matrice densité ρ, que l'on peut écrire comme suit.
ρ=b,c=0∑n−1∣b⟩⟨c∣⊗ρb,c
Dans cette expression, nous supposons que les états classiques de X sont 0,…,n−1.
Nous supposerons que la mesure elle-même est décrite par la collection de matrices
{P0,…,Pm−1}.
Cette mesure peut alternativement être décrite comme un canal Φ de X vers Y, où Y est un nouveau système ayant l'ensemble d'états classiques {0,…,m−1}.
Plus précisément, l'action de ce canal peut être exprimée comme suit.
Nous considérons une mesure du système X, donc les probabilités avec lesquelles les différents résultats de mesure sont obtenus ne peuvent dépendre que de ρX, l'état réduit de X.
En particulier, la probabilité que chaque résultat a∈{0,…,m−1} apparaisse peut être exprimée de trois façons équivalentes.
Tr(PaρX)=Tr(PaTrZ(ρ))=Tr((Pa⊗IZ)ρ)
La première expression représente naturellement la probabilité d'obtenir le résultat a d'après ce que nous savons déjà sur les mesures d'un système unique.
Pour obtenir la deuxième expression, on utilise simplement la définition ρX=TrZ(ρ).
Pour obtenir la troisième expression, il faut réfléchir davantage — et les apprenants sont encouragés à se convaincre que c'est vrai.
Voici un indice : l'équivalence entre les deuxième et troisième expressions ne dépend pas du fait que ρ soit une matrice densité ni que chaque Pa soit semi-définie positive. Essaie de le montrer d'abord pour des produits tensoriels de la forme ρ=M⊗N et conclus ensuite que c'est vrai en général par linéarité.
Bien que l'équivalence des première et troisième expressions dans l'équation précédente ne soit pas immédiate, elle a un sens.
En partant d'une mesure sur X, on définit effectivement une mesure de (X,Z), où l'on ignore simplement Z et l'on mesure X.
Comme toute mesure, cette nouvelle mesure peut être décrite par une collection de matrices, et il n'est pas surprenant que cette mesure soit décrite par la collection
Si l'on veut déterminer non seulement les probabilités des différents résultats mais aussi l'état résultant de Z conditionné à chaque résultat de mesure, on peut se tourner vers la description en canaux de la mesure.
En particulier, examinons l'état que l'on obtient lorsqu'on applique Φ à X en ne faisant rien à Z.
Note que ceci est une matrice densité en vertu du fait que Φ est un canal, donc chaque matrice
TrX((Pa⊗IZ)ρ) est nécessairement semi-définie positive.
Une dernière étape transforme cette expression en une expression qui révèle ce que nous cherchons.
comme on en a vu dans la leçon Matrices densité.
Pour chaque résultat de mesure a∈{0,…,m−1}, nous avons avec probabilité
p(a)=Tr((Pa⊗IZ)ρ)
que Y est dans l'état classique ∣a⟩⟨a∣ et Z est dans l'état
σa=Tr((Pa⊗IZ)ρ)TrX((Pa⊗IZ)ρ).(2)
C'est-à-dire que c'est la matrice densité que l'on obtient en normalisant
TrX((Pa⊗IZ)ρ)
en la divisant par sa trace.
(Formellement, l'état σa n'est défini que lorsque la probabilité p(a) est non nulle ;
lorsque p(a)=0 cet état est sans importance, car il se réfère à un événement discret qui se produit avec probabilité nulle.)
Naturellement, les probabilités des résultats sont cohérentes avec nos observations précédentes.
En résumé, voici ce qui se passe lorsque la mesure {P0,…,Pm−1} est effectuée sur X quand (X,Z) est dans l'état ρ.
Chaque résultat a apparaît avec probabilité p(a)=Tr((Pa⊗IZ)ρ).
Conditionnellement à l'obtention du résultat a, l'état de Z est alors représenté par la matrice densité σa donnée par l'équation (2), obtenue en normalisant TrX((Pa⊗IZ)ρ).
On peut adapter cette description à d'autres situations, par exemple lorsque l'ordre des systèmes est inversé ou lorsqu'il y a trois systèmes ou plus.
Conceptuellement, c'est simple, bien que l'écriture des formules puisse devenir fastidieuse.
En général, si l'on a r systèmes X1,…,Xr, l'état du système composé (X1,…,Xr) est ρ, et la mesure {P0,…,Pm−1} est effectuée sur Xk, voici ce qui se passe.
Chaque résultat a apparaît avec probabilité
p(a)=Tr((IX1⊗⋯⊗IXk−1⊗Pa⊗IXk+1⊗⋯⊗IXr)ρ).
Conditionnellement à l'obtention du résultat a, l'état de (X1,…,Xk−1,Xk+1,…,Xr) est alors représenté par la matrice densité suivante.